Earth’s magnetic field is far stronger than that of Venus or Mars, and this single fact explains why life on earth is abundant while its nearest neighboring planets do not at present support life.
Earth’s magnetic field extends from its outer core (where swirling molten iron produces a dynamo effect) up through the magnetosphere, extending many thousands of miles out into space. This magnetic field protects Earth from the solar wind and cosmic rays that would otherwise destroy the upper atmosphere including the ozone layer that shields us from lethal ultraviolet radiation. Mars and Venus are not so protected.
Why does Earth, as opposed to Mars and Venus, have this magnetic field? To develop and sustain a magnetic field that is generated by an internal dynamo, there are three requirements: a conducting liquid, rotation and convection. Earth’s outer core has all of these.
In Venus, current theory holds that the missing element is convection. Details are not known, but it appears that the temperature differential in the core is too small to sustain convection, which is heat transfer due to physical motion of the heated medium. Therefore, an internal dynamo capable of creating a magnetic field does not exist.
The situation on Mars is quite different. It is theorized that the red planet lost its magnetosphere four billion years ago, perhaps because of numerous asteroid strikes that may have disrupted one or more of the requirements for an internal dynamo.
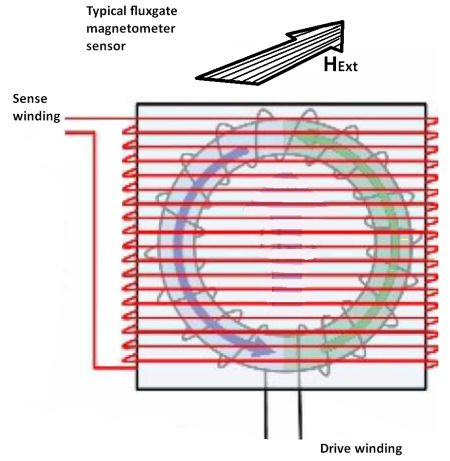 Measurements of the earth’s magnetic field generally employ either a fluxgate magnetometer, which gives vector components of the field, or a proton precession magnetometer which measures scalar field intensity. Fluxgate sensors typically employ rings of a highly magnetically permeable alloy. Each core typically contains two coil windings, a drive winding and a sense winding. Some sensors also use a third winding for feedback if the sensor operates in closed-loop mode. Typically, there is one ring core to measure the field in each of the three axes.
Measurements of the earth’s magnetic field generally employ either a fluxgate magnetometer, which gives vector components of the field, or a proton precession magnetometer which measures scalar field intensity. Fluxgate sensors typically employ rings of a highly magnetically permeable alloy. Each core typically contains two coil windings, a drive winding and a sense winding. Some sensors also use a third winding for feedback if the sensor operates in closed-loop mode. Typically, there is one ring core to measure the field in each of the three axes.
The drive signal for the ring core typically consists of a periodic bipolar current pulse on the drive winding. The current pulse drives the material around its B-H loop and deeply saturates the core in alternate directions (magnetized – unmagnetized – inversely magnetized – unmagnetized – magnetized, and so on).
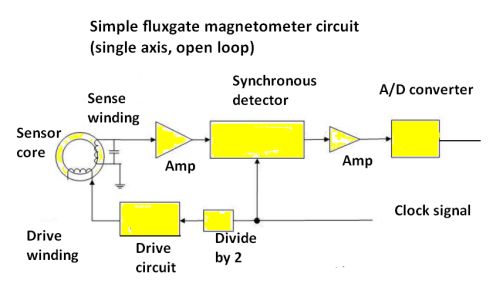
The sense winding placed around the sensor picks up an induced voltage caused by changing flux within the coil caused by an external field. This induced voltage appears as a signal at twice the drive frequency. The drive frequency f is typically tens of kilohertz. Thus the induced 2f will be twice that. Sense and detection electronics extract the magnitude and phase of the small field-proportional signal to determine the field magnitude and direction.
Designs that just amplify the resulting signal are known as open-loop designs. But some designs put the output signal through an integrator and feed it into a feedback winding to null out the field in the core. This kind of closed-loop design improves linearity.
Fluxgate magnetometers that measure magnetic fields in three axes generally use three rings, but it is possible to only use two rings equipped with dual sense windings.
In contrast, proton precession magnetometers only measure the magnitude of the magnetic field of the earth, not the direction. As a quick review, precession is the slow movement of the axis of a spinning body around another axis due to a torque (such as gravitational influence) which changes the direction of the first axis. The classic example of precession is the circle slowly traced out by the pole of a spinning gyroscope.
 The proton precession magnetometer is based on the precession of protons in a magnetic
The proton precession magnetometer is based on the precession of protons in a magnetic
field. A common source of protons in a proton precession magnetometer is water. The magnetic dipoles of protons (hydrogen nuclei) in a sample of water are temporarily aligned or polarized by application of a magnetic field produced by a current in a coil of wire. When the current is suddenly removed, the spin of the protons causes them to precess about the direction of the earth magnetic field. This precession of protons causes a small signal in the same coil used to polarize the protons.
The precession of the protons in the proton-rich medium will not be in phase. This is why the proton-rich medium is first subjected to a strong magnetic field by connecting the coil to a power source. This process is referred to as polarization. The polarization voltage is applied until the alignment of dipoles takes place. The minimum polarization time is set by what’s called the medium’s spin-lattice relaxation time, usually a few seconds for water.
After the polarization, the magnetization of the protons decays exponentially and so
the signal disappears after few seconds. The signal picked up by the sensor is connected to an amplifier chain for recording of data points.
The diameter of the wire-wound containers is generally on the order of a few inches. The induced rms signal voltage from such devices is in the order of microvolts.



Is is possible that the earth’s magnetic field is the result of it’s iron core spinning at right angles to incident solar EM radiation? The North Pole is moving at roughly 24 miles per year in the direction of Siberia. This being the case, I’m also wondering if this magnetic axis inclination change could affect the net energy uptake from the solar EM radiation.
First I don’t think the “iron core theory” holds Think about it. Or is this a guess of outdated methods? Listen to Sky scholar as physics is changing before our eyes
Your’e right, the molten core theory is redundant and a joke.
I am about to put a video up on YouTube showing exactly what Earth is and how it works.
Is it a thought to con pair the earth magrav field to the atmospheric field as a point of reference for anti gravity within the earth’s field?What has misdirection led us to?The abuse of forcing conditions and believing that’s how it is look at electricity going to your house it’s so angry when it stops u can’t turn on nothing ! But the magrav field around the earth is dancing with nothing but love .So what would it take to establish a dancing magrav field that would never turn off but constantly continuum of a dancing plasma magnetic and gravitational field in resonance? Let’s Dance!!!!!!!!!!