The Ethernet computer networking protocol is used in local area networks, metropolitan area networks and wide area networks. While the term is often used to distinguish wired data transmissions from Wi-Fi, both use parallel protocol details, notably 48-bit MAC address and Ethernet frame format. Actually, Wi-Fi is Ethernet over a different medium. There are a […]
FAQ
The difference between spontaneous emissions and stimulated emissions

The terms spontaneous emission and stimulated emission sometimes get confused. The term thermal emission sometimes gets thrown into the mix as well. Here are the basic definitions to help sort things out and the procedures for measuring these parameters. When we speak of spontaneous or stimulated emissions we are referring to atoms whose electrons are […]
Digital caliper, Pt 2: Implementation and extensions

Use of electronics and capacitive-based position sensing have transformed the caliper, a fundamental and essential instrument of precision linear-dimension measurement. Part 1 of this FAQ looked briefly at the basic mechanical, Vernier, and dial-readout calipers, as well as the micrometer. All these mechanical-only embodiments of the caliper were made obsolete within a few years with […]
The difference between attenuation in conductors and optical fibers

Electrical power moves through a conductor when opposing dc or ac voltages are applied at opposite ends. Charge carriers — free electrons or electron holes in semiconductors, ions in electrolytes – migrate toward the opposite poles. Metals, with abundant free electrons, have high conductivity. All conductors are partial insulators and all insulators are, to some […]
Digital caliper, Pt 1: Background and predecessors

Use of electronics and capacitive-based position sensing have transformed the caliper, a fundamental and essential instrument of precision linear-dimension measurement. Making precise measurements across small distances of up to several inches or tens of centimeters is an obvious and fundamental requirement of modern metrology, research, and mass production. But how can that be done accurately, […]
Cathode ray tube vs. flat screen displays in oscilloscopes

Prior to the digital revolution in electronic instrumentation, oscilloscopes displayed waveforms on cathode ray tube screens. Modern digital oscilloscopes universally have flat screens. The flat screen is light, thin, consumes far less energy, and is less expensive to manufacture. All agree that it is a great improvement. The one advantage of CRT technology is that […]
Mitigating ac motor-shaft voltage and bearing currents

Bearing problems are the greatest single contributing factor in motor failure. Often motor damage happens before bearing wear is noticeable. To avoid expensive repairs and costly downtime, early detection is essential. Proper installation of replacement bearings and correct lubrication are critical. It is well known that insufficient lubrication brings early bearing failure, but many maintenance […]
The difference between metal conductors and waveguides
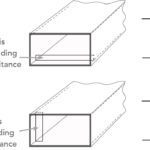
Manufacturers of instrumentation are striving to satisfy the demands of modern electronics which continuously require greater bandwidth. There has been a growing tendency to incorporate waveguides, ranging from extremely small units soldered into printed circuits, to larger devices mounted in enclosures. The natural question that arises is how waveguides differ from ordinary wiring, and why […]
The difference between histograms and spectrograms
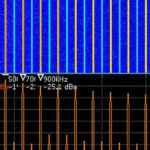
Despite their similar names, histograms and spectrograms are totally different ways of displaying a signal or function in a digital storage oscilloscope (DSO). Both are useful in organizing and analyzing electrical waveforms, but the type of information that is displayed and the conclusions that may be drawn from them are worlds apart. Histograms and spectrograms […]
Induction motor vs synchronous: What’s the difference?

All rotary electric motors, ac, and dc, operate because of the interaction of two magnetic fields. One is stationary and is (usually) associated with the motor’s outer enclosure. The other rotates and is associated with the motor’s spinning armature (also called its rotor). Rotation is caused by the interaction between the two fields. In a […]
